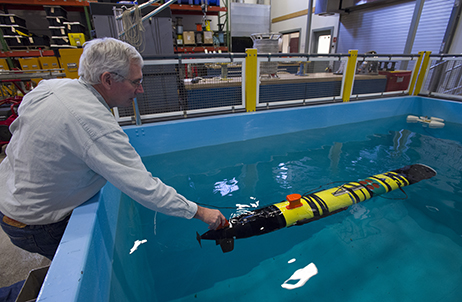
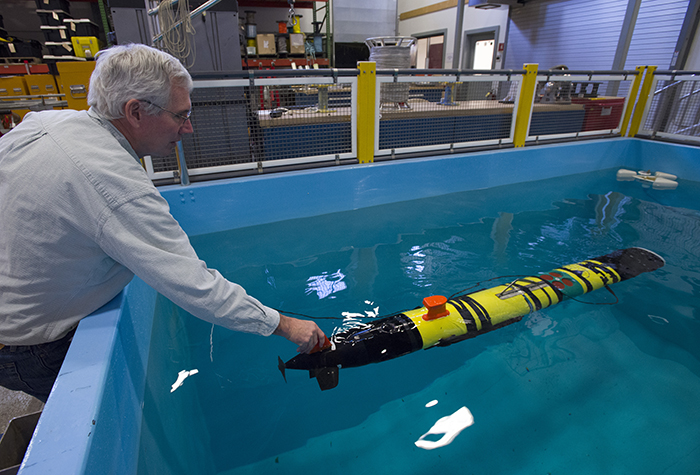
WHOI engineer Ben Allen tests a specially equipped REMUS 100 designed to hover and is used to detect and survey the hull of a ship or, in this case, the sides of the tank. (Photo by Tom Kleindinst, Woods Hole Oceanographic Institution)
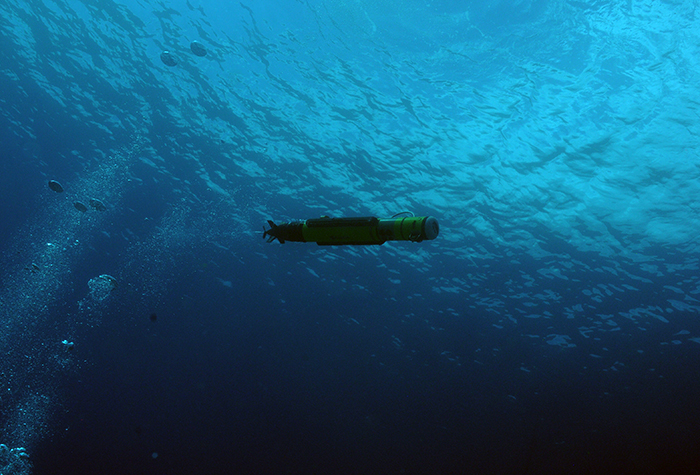
A REMUS 100 autonomous underwater vehicle dove through the clear waters of the Mediterranean in September 2011 on a mission to find and survey Bronze Age shipwrecks off the coast of Greece. (Photo by Brendan Foley, Woods Hole Oceanographic Institution)
In 2006, WHOI biologists used a REMUS 100 to make detailed measurements of currents that may sweep fish larvae on and off reefs to help guide the design of a marine preserve in Beliz. (Photo by Andrey Scherbina, Woods Hole Oceanographic Institution)

A REMUS 100 works just below the surface in Glover's Reef Marine Reserve off Belize, while the crew watch from the launch boat as part of a study of the larvae of Nassau grouper. (Photo by Andrey Scherbina, Woods Hole Oceanographic Institution)

In 2013, a group of WHOI scientists and engineers deployed a REMUS 100 "IceBot" in Saqqarliup fjord in Southwest Greenland as part of a unique study to measure water discharge in the "red zone," an area less than 1 kilometer (one-half mile) from the calving front of the glacier. (Photo by Amy Kukulya, Woods Hole Oceanographic Institution)

Members of the CATALYST ONE expedition team prepare for a sunrise launch in December 2008 of one of two REMUS 6000 underwater vehicles to create the first-ever high definition side-scan sonar maps of deep-water Lophelia and Oculina coral reefs off the coast of eastern Florida. (Photo by Mike Purcell, Woods Hole Oceanographic Institution)

Scientists prepare to launch REMUS from R/V Tioga during a survey in shallow water off Chatham, Mass., in early 2006. (Photo by Chris Linder, Woods Hole Oceanographic Institution)

In January 2011, a REMUS 100 made its way across Lake Rotomahana, New Zealand, where geologists were searching for signs of the Pink and White Terraces, spectacular geothermal features that disappeared during an immense volcanic explosion in 1886. (Photo courtesy of Dan Fornari, Woods Hole Oceanographic Institution)
Large scale survey is conducted using sidescan sonar as the primary sensor, followed by a small area survey using high resolution cameras for positive target identification. (Animation by Tim Silva, Woods Hole Oceanographic Institution)
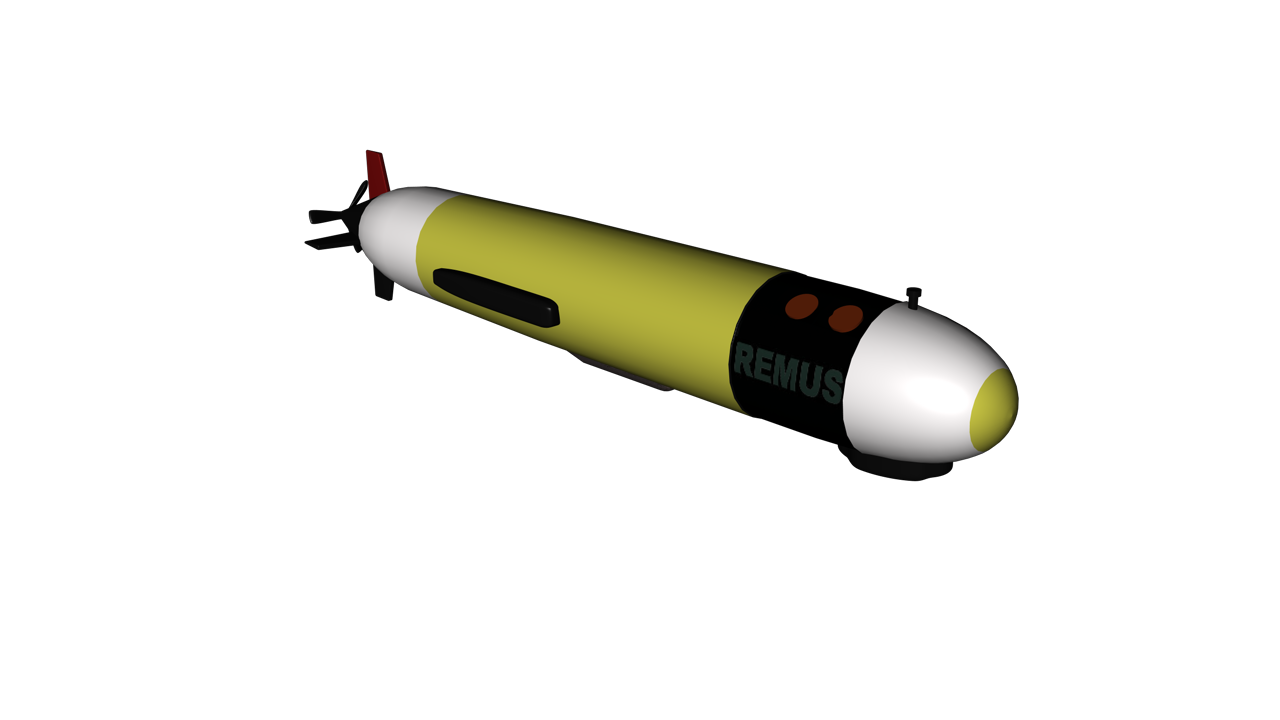
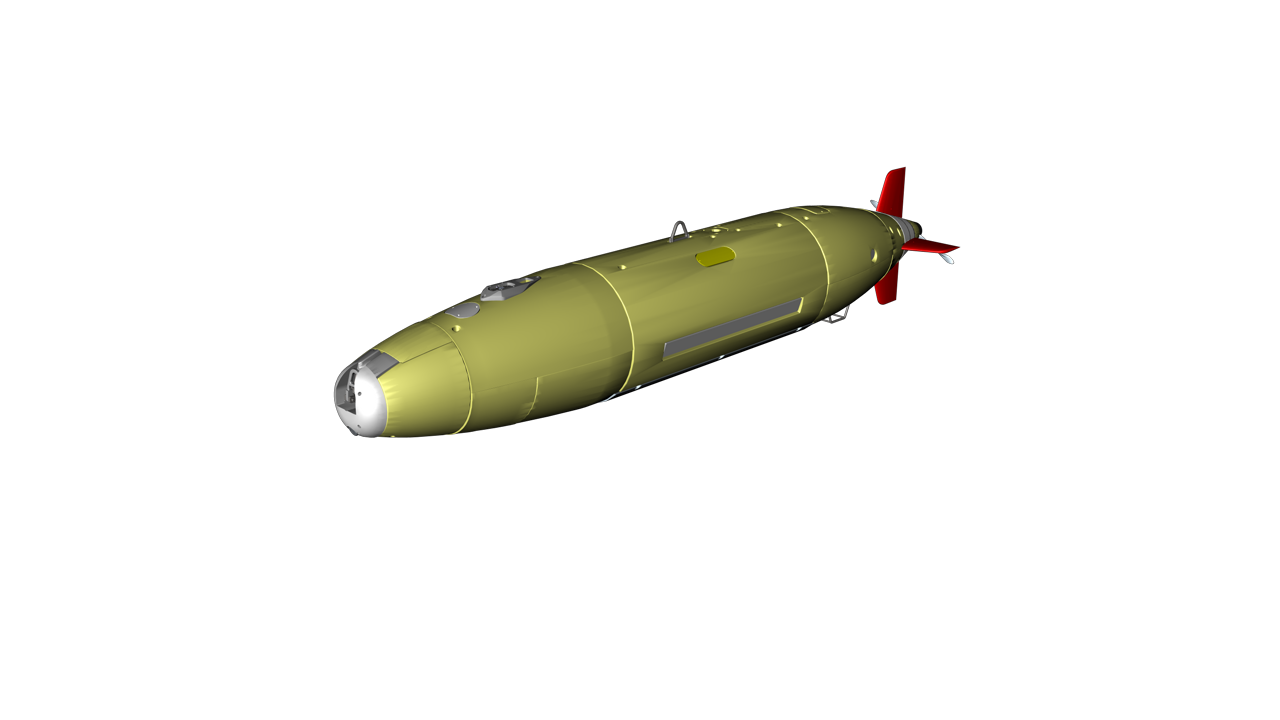
REMUS vehicles overview. (Edited by Tim Silva, Woods Hole Oceanographic Institution)
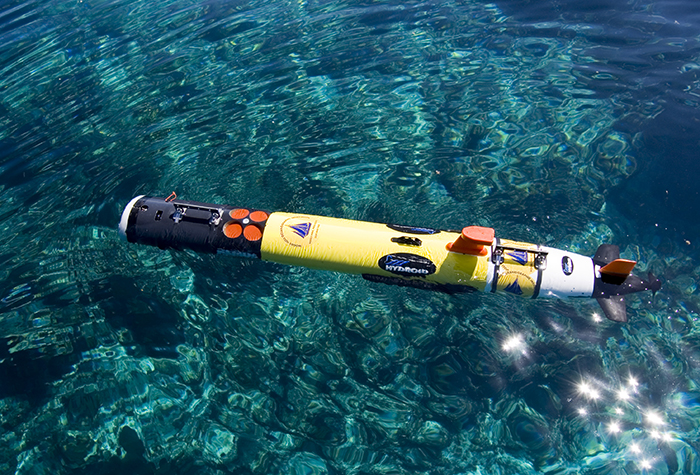
Remote Environmental Monitoring UnitS, or REMUS vehicles, are low-cost autonomous underwater vehicles (AUVs) designed by WHOI's Oceanographic Systems Lab to operate in the field with a simple laptop computer. Initially developed for coastal monitoring, these torpedo-shaped vehicles are now used to carry a variety of instruments up to 6,000 meters (nearly 20,000 feet) depth. REMUS vehicles are particularly well suited for surveying, measuring, and mapping over wide areas of the water column or ocean floor.
| Length | 3.84m (12.6 ft.) |
| Diameter | 19cm (7.5 ft.) |
| Weight | 37kg (80 lbs.) |
| Maximum Depth | 100m (330 ft.) |
| Endurance | Up to 22 hours |
| Velocity | Up to 2.6 m/s (5 kts.) |
| Length | 3.84m (12.6 ft.) |
| Diameter | 71cm (28 in.) |
| Weight | 862kg (1,900 lbs.) |
| Maximum Depth | 6000m (19,685 ft./3.7 miles) |
| Endurance | Up to 22 hours |
| Velocity | Up to 2.6m/s (5 kts.) |